



Det finns olika typer av förvaringshyllor i lagret och förvarings- och hämtningsmetoderna är huvudsakligen indelade i följande kategorier, inklusive manuell förvaring och hämtning, förvaring och hämtning av gaffeltruckar samt automatisk lagring och hämtning. Nuförtiden vill många företag realisera automatisk lagerdrift, så de vill använda automatiserade lagerhyllor. Till exempel är fyrvägsbilställ ett slags automatiserat förvaringsställ. Hur går fyrvägsskytteln AGV in och ut från lagret? Lagret tunga hyllor produktionsanläggning Haigris analyserade.

Fyrvägs skyttellager
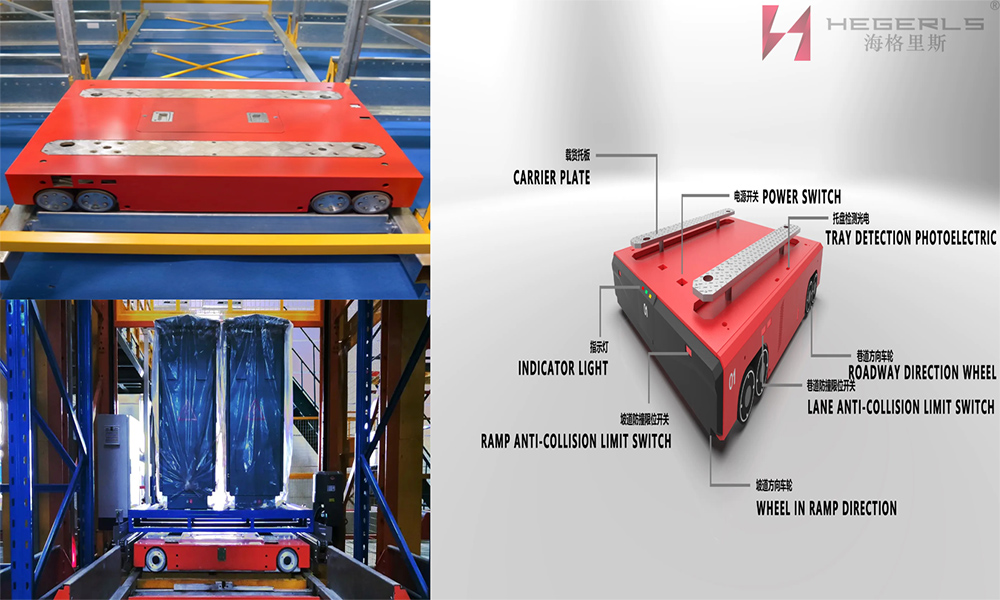
Fyrvägsskyttelbilen är utrustad med 12 hjul, som kan färdas i fyra riktningar längs spårplanet och fritt nå alla lastutrymmen på lagerplanet. Fyrvägsskytteln drivs av hjulen på båda sidor samtidigt för att säkerställa att karossen inte böjs under drift, och den kan löpa växelvis längs de längsgående och tvärgående skenorna på den tredimensionella hyllan.

Samtidigt är fyrvägsskytteln en intelligent hanteringsanordning som inte bara kan gå i längdled utan även i sidled. Fyrvägsskytteln har hög flexibilitet, kan ändra arbetsbanan efter behag och anpassa systemets kapacitet genom att öka eller minska antalet skyttelbilar. Vid behov kan systemets toppvärde besvaras genom att upprätta schemaläggningsläget för arbetsfordonsteamet, lösa flaskhalsen för in- och utpassering, och kan även ersättas med varandra, När en skyttel eller hiss misslyckas, andra skyttel eller hissar kan skickas genom avsändningssystemet för att fortsätta att slutföra operationen utan att påverka systemets kapacitet. Denna enhet är lämplig för både lågflödes- och högdensitetslagring, såväl som högflödes- och högdensitetslagring. Det kan uppnå större effektivitet, kostnader och resurser.
Hur går fyrvägsskytteln AGV in och ut från lagret?

1) Lagermetod
a) Teknikerna för den intelligenta fyrvägsskytteln sätter först på den intelligenta fyrvägsskytteln och gör den klar. Den intelligenta fyrvägsskytteln är i standby;
b) Efter att ha bekräftat plockningsplatsen för den intelligenta fyrvägsskytteln, kommer WCS att planera körvägen enligt den aktuella platsen och destinationsplatsen för den intelligenta fyrvägsskytteln, och sedan kommer personalen att distribuera varor till den intelligenta fyrvägsskytteln. skyttel genom WCS;
c) Den intelligenta fyrvägsskytteln börjar utföra leveransuppgiften enligt det mottagna uppgiftskommandot;
d) På det korsande spåret färdas den intelligenta fyrvägsskytteln i förskjutningsläge genom den faktiska sträckan. Under körningsprocessen skannar den kontinuerligt spåren som den nedre delen av fordonskarossen passerar genom. Varje korsningsposition den passerar bedömer och kalibrerar den sträcka den färdas genom att skanna spåren. När den är nära destinationen finjusterar den parkeringspositionen genom den laterala lasersensorn för att uppnå exakt positionering av parkeringspositionen;
e) I underkanalen kan den intelligenta fyrvägsskytteln skanna tvärspåret och sidokalibreringsspegelreflektorn, bedöma och kontrollera körsträckan genom att skanna punktpositionen och uppnå exakt positioneringskontroll i underkanalen för att nå destinationen;
f) När den intelligenta fyrvägsskytteln anländer till den valda plockpositionen faller pallen, varorna läggs på hyllan och WCS-systemet meddelas om slutförandet av leveransuppgiften;
g) Den intelligenta fyrvägsskytteln fortsätter att ta emot uppgiftsinstruktioner eller återgår till standbyområdet.
2) Leveranssätt
a) Teknikerna för den intelligenta fyrvägsskytteln sätter först på den intelligenta fyrvägsskytteln och gör den klar. Den intelligenta fyrvägsskytteln är i standby;
b) Efter att ha bekräftat plockningsplatsen för den intelligenta fyrvägsskytteln, kommer WCS att planera körvägen enligt den intelligenta fyrvägsskyttelns aktuella plats och destinationsplats, och sedan kommer personalen att skicka plockningsuppgiften till den intelligenta fyran - pendelbuss genom WCS;
c) Den intelligenta fyrvägsskytteln börjar plocka upp varor enligt det mottagna uppgiftskommandot;
d) På korsningsspåret färdas den intelligenta fyrvägsskytteln i deplacementläge genom den faktiska sträckan. Under körningsprocessen skannar den kontinuerligt spåren som den nedre delen av fordonskarossen passerar genom. Varje korsningsposition den passerar bedömer och kontrollerar sträckan den färdas genom att skanna spåren. När den närmar sig destinationen finjusterar den parkeringspositionen genom den laterala lasersensorn för att uppnå exakt positioneringskontroll och parkering;
e) I underkanalen skannar den intelligenta fyrvägsskyttelbilen tvärbanan och sidokalibreringsspegelreflektorn, bedömer och kalibrerar körsträckan genom att skanna dessa punkter och realiserar kontrollen av exakt positionering i underkanalen för att nå destinationen .
Posttid: 2022-09-19